Servo Motor vs. Stepper Motor:Which is Best?
Catalog
Introduction of Servo Motor vs. Stepper MotorUnderstanding Motor SelectionWhat is A servo motor ?Key Considerations for Motor PerformanceServo Motors vs. Stepper MotorsAddressing Open-Loop IssuesThe Rise of Closed-Loop Stepper MotorsConclusionFrequently Asked QuestionsRelated ArticlesIntroduction of Servo Motor vs. Stepper Motor
In the world of automation and robotics, servo motors and stepper motors are two of the most commonly used drive components. Each motor type has its own unique operating principles and application scenarios, making the choice between them crucial for the performance and efficiency of a project. Servo motors are known for their high precision and rapid response, making them ideal for complex motion control tasks. In contrast, stepper motors are favored for their simplicity in control and precise positioning, especially in low-speed and lower-load applications. This article will delve into the features, advantages, and disadvantages of both motor types, helping you determine which is the best fit for your specific needs.
When engineers are working on any motion control project, one of the biggest decisions they face is picking the right motor. It’s super important to get the type and size just right to make sure the machine runs efficiently. Plus, keeping it within budget is always a top priority.
So, one of the first things to think about is: What type of motor is best for this situation? Do we need a high-performance servo motor, or would a more affordable stepper motor do the trick? Or maybe there’s a middle-ground option we should look into?
The answers really start with what the specific application needs. There are a bunch of factors to consider before figuring out which motor would be the best fit.
For example, these closed-loop stepper motors from Parker Hannifin—check out their drives on the left—they’re super user-friendly and provide good torque at low speeds without the usual worries of losing position like with traditional steppers.
Understanding Motor Selection
The Requirements
How many cycles per minute does the motor need to run? How much torque are we looking for? What’s the peak speed we need?
These key questions can’t just be answered by picking a motor based on horsepower alone.
Motor power output comes from the combination of torque and speed, and you can calculate it by multiplying speed, torque, and a constant.
But here’s the thing: because of how this calculation works, there are loads of different torque and speed combinations that can give you the same power output. So, even if two motors have similar power ratings, they might perform differently based on the speed and torque they provide.

Machinedesign Com Sites Machinedesign com Files G1 Cl Stepper
What is A servo motor ?
A servo motor typically packs a lot of torque into a small size and has segmented laminations.

servo motor
Key Considerations for Motor Performance
Torque and Speed Curves
Before engineers pick a motor, they need to know how fast a specific load needs to move. The task has to fit within the motor’s torque/speed curve, which shows how the motor’s torque changes while it’s working. By using “worst-case” assumptions (basically figuring out the max and min torque and speed the job will need), engineers can be sure that the motor they choose has a solid torque/speed curve.
Another important factor to think about is the load’s inertia. You’ve got to calculate the inertia ratio, which compares the load’s inertia to the motor’s inertia. A common rule of thumb is that if the load’s inertia is more than 10 times that of the rotor, tuning the motor can get tricky and performance might drop. But this rule isn’t one-size-fits-all; it changes depending on the technology, the supplier, and even the specific product. How critical the application is also plays a big role. Some products can handle ratios of up to 30-to-1, while direct drives can go as high as 200-to-1. A lot of folks aren’t fans of sizing a motor with a ratio over 10-to-1.
Physical Limitations
Finally, are there any physical limits that make one motor a better choice than another? Motors come in all sorts of shapes and sizes. Sometimes, they can be big and bulky, and certain setups just can’t accommodate a larger motor. Before making a smart choice about which motor to use, it’s important to recognize and understand these physical specs.
Once engineers have answered all the big questions—like speed, torque, horsepower, load inertia, and any physical limitations—they can really focus on finding the most efficient size motor. But the decision-making doesn’t stop there. They also need to figure out which type of motor is the best fit for the application. For a long time, most applications boiled down to two main options: a servo motor or an open-loop stepper motor.
The open-loop stepper motor is made to run at low speeds while still delivering high torque.

Machinedesign Com Sites Machinedesign com Files G3 Stepper Motor
Servo Motors vs. Stepper Motors
Operational Differences
The way servo and open-loop stepper motors operate is pretty similar, but there are some key differences that engineers need to get a grip on before deciding which motor is the best match for a specific application.
Servo Motor vs. Stepper Motor
In traditional servo systems, a controller sends commands to the motor’s drive using either pulse and direction signals or an analog command that relates to position, speed, or torque. Some controls might use a bus-based method, which, in the latest setups, is usually an Ethernet-based communication method. The drive then delivers the right current to each phase of the motor. Motor feedback loops back to the motor’s drive and, if needed, to the controller. This info is crucial for the drive to properly commutate the motor and give accurate data about the motor shaft's dynamic position. That’s why servo motors are considered closed-loop motors; they have built-in encoders, and positional data is frequently sent to the controller. This feedback gives the controller better control over the motor. It can adjust operations, to some extent, if things aren’t running as they should. This kind of important info is something open-loop stepper motors just can’t provide.
Stepper motors also work based on commands sent to the motor’s drive to control distance and speed. Usually, this signal is a step-and-direction command. But here’s the catch: open-loop steppers don’t provide feedback to operators, so their controls can’t really assess a situation or make adjustments to improve the motor’s performance.
For example, if a motor doesn’t have enough torque to handle the load, it might stall or miss steps. When that happens, the target position won’t be reached. And because of the open-loop nature of stepper motors, that inaccurate positioning won’t be communicated back to the controller, so it can’t make any adjustments.
Advantages of Servo Motors
The servo motor definitely has some clear advantages when it comes to efficiency and performance, so why would anyone go for a stepper motor? There are a few reasons. The biggest one is price; budgets are super important when making design choices. As budgets get tighter, it’s crucial to cut unnecessary costs. This isn’t just about the cost of the motor itself; routine and emergency maintenance for stepper motors is usually cheaper compared to servos. So, if the benefits of a servo motor don’t justify the price tag, a standard stepper motor might just do the job.
From an operational point of view, stepper motors are way easier to use than standard servo motors. Running a stepper motor is simpler to understand and easier to set up. Most people would agree that if there’s no need to complicate things, it’s better to keep it simple.
The benefits of these two motor types are pretty different. Servo motors are perfect if you need speeds over 3,000 rpm and high torque. But if you only need speeds of a few hundred rpm or less, a servo motor might not be the best choice—it could be overkill for low-speed applications.
Advantages of Stepper Motors
That’s where stepper motors really shine! They’re not only great at stopping accurately but are also built to run at low speeds while still providing high torque. Because of this design, stepper motors can be controlled and pushed up to their velocity limits. Typically, stepper motors have a velocity limit of under 1,000 rpm, while servo motors can reach rated speeds of 3,000 rpm or even higher—sometimes over 7,000 rpm!
Machinedesign Com Sites Machinedesign com Files G4 Open Loop Stepper
If a stepper motor is sized just right, it can be the perfect choice. But when a stepper is running in an open-loop setup and something goes wrong, operators might not get all the info they need to fix the issue.
Addressing Open-Loop Issues
Solving the Open-Loop Problem
Over the last few decades, there have been several approaches to tackle the usual problems with open-loop steppers. One method is homing the motor to a sensor when it powers up or even a few times during operation. While this is simple, it slows things down and doesn’t catch problems that pop up during normal use.
Another approach is to add feedback to see if the motor is stalling or out of position. Engineers at motion control companies have come up with features like “stall detection” and “position maintenance.” Some have even taken it a step further by treating stepper motors more like servos, or at least mimicking them with clever algorithms.
In the broad range of motors—between servos and open-loop stepper motors—you’ll find a newer technology called the closed-loop stepper motor. This is a great and cost-effective way to solve the issues of applications that need positional accuracy and low speeds. By using high-resolution feedback devices to close the loop, engineers can enjoy the “best of both worlds.”
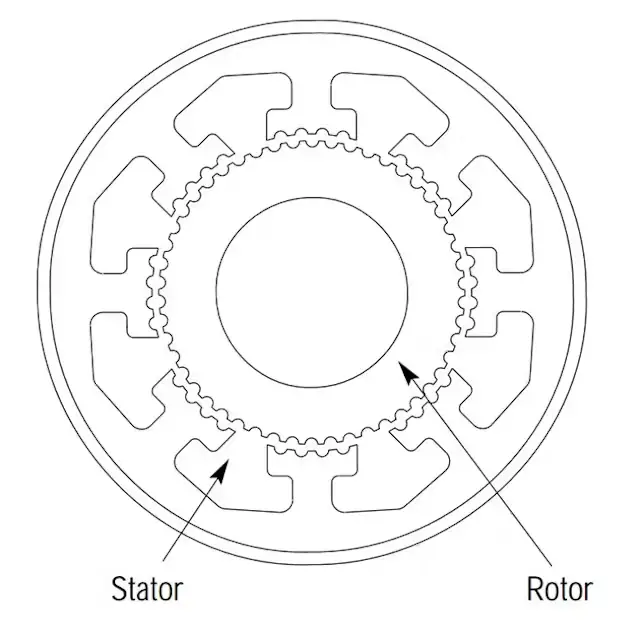
Machinedesign Com Sites Machinedesign com Files G5 Servo Cross Section
The Rise of Closed-Loop Stepper Motors
Closed-loop stepper motors bring all the perks of regular stepper motors: they’re easy to use, simple, and can run consistently at low speeds with accurate stopping. Plus, they still have the feedback capabilities that servo motors offer. And the best part? They don’t come with the hefty price tag that servos often have.
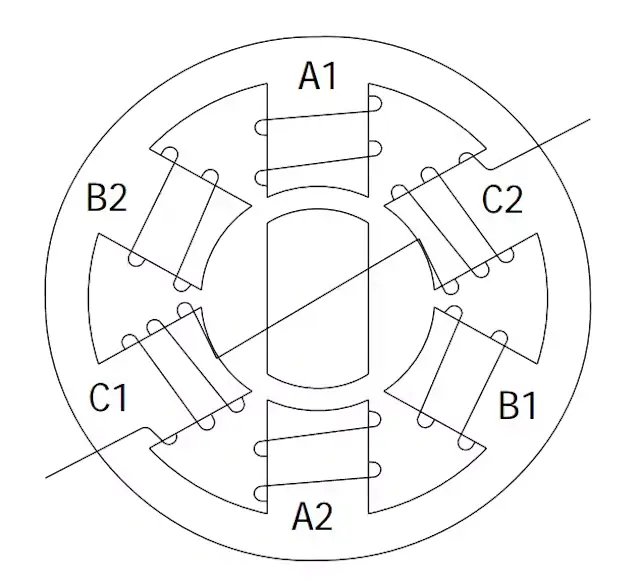
The key to this is how open-loop stepper motors work. They usually have two coils, sometimes five, with a magnetic balancing act happening between them. When the motor moves, it messes with this balance, which can cause the motor’s shaft to lag behind electrically. But the operator can’t know how far behind it is. While the stopping point is repeatable for open-loop steppers, it doesn’t always work for all loads. By adding an encoder to the stepper and turning it into a closed loop, you get some dynamic control. This means operators can stop right on the exact spot, even with different loads.
These benefits have really boosted the popularity of closed-loop stepper motors in the motion-control world, especially in key industries like semiconductors and medical devices. Engineers in these fields need to know precisely where motors are positioning loads or actuators, whether it’s for a belt or a ball screw. The closed-loop feedback in these steppers gives them that exact info. Plus, they can sometimes outperform servos at lower speeds.
Conclusion
In general, any application that requires guaranteed performance at a lower cost than a servo, and the ability to run at relatively low speeds, is a great fit for closed-loop stepper motors.
Just remember, operators need to make sure the drive or controls can support closed-loop stepper motors. In the past, you could find a stepper with an encoder on it, but if the drive was just a standard stepper drive, it wouldn’t support encoders. You’d have to send the encoder info back to the controller and verify the position at the end of a move. But that’s not the case anymore with the new closed-loop stepper drives. They can automatically handle position and speed control on their own, without needing to involve the controllers.
Frequently Asked Questions
Which is better, a servo or stepper motor?
Well, servo motors tend to be more efficient than stepper motors, usually sitting between 80-90% efficiency. If you're looking at overall performance, servos are the way to go for high speed and high torque tasks. On the flip side, stepper motors shine in situations where you need lower acceleration but still want that high holding torque.
Why would you use a servo instead of a motor?
Servo motors have this cool ability to deliver peak torque for short bursts. This is super helpful when dealing with load changes or if you need higher acceleration from the motor.
Why are stepper motors better?
Stepper motors work by syncing up perfectly with the pulse signals from the controller to the driver. This means you get really accurate positioning and speed control. They’re great at maintaining high torque with low vibration at lower speeds, making them perfect for tasks that need quick positioning over short distances.
Why is a servo motor preferred?
Servos are typically used for specific angular or linear positions, plus they handle velocity and acceleration really well. Companies love servo motors because they’re compact but powerful. Even with their small size, they pack a punch and are super energy-efficient!
Related Articles
What Stepper Motor IS & How It Works
What Induction Motor Is and How It works

Christopher Anderson
Christopher Anderson has a Ph.D. in electrical engineering, focusing on power electronics. He’s been a Senior member of the IEEE Power Electronics Society since 2021. Right now, he works with the KPR Institute of Engineering and Technology in the U.S. He also writes detailed, top-notch articles about power electronics for business-to-business electronics platforms.
Subscribe to JMBom Electronics !